Willkommen

hdrpano, Technische Fotografie, Hardware und Software Entwicklung, © Kilian Eisenegger 2026 info@hdrpano.ch, 4800 Zofingen, Switzerland, HTML 5 optimiert
Impressum
Welcome to my private homepage. As an Alpinist and biker I come in my spare time to many beautiful places, which I often capture photographically. Either with DJI drones or with my self-built panorama robots. I load the 3D pictures on Google Street View. They can then be viewed in Google Maps. I am Google Street View trusted = certi- fied. For publishing the 360° pictures I use Pano2VR and krpano.
Hardware and Software Development
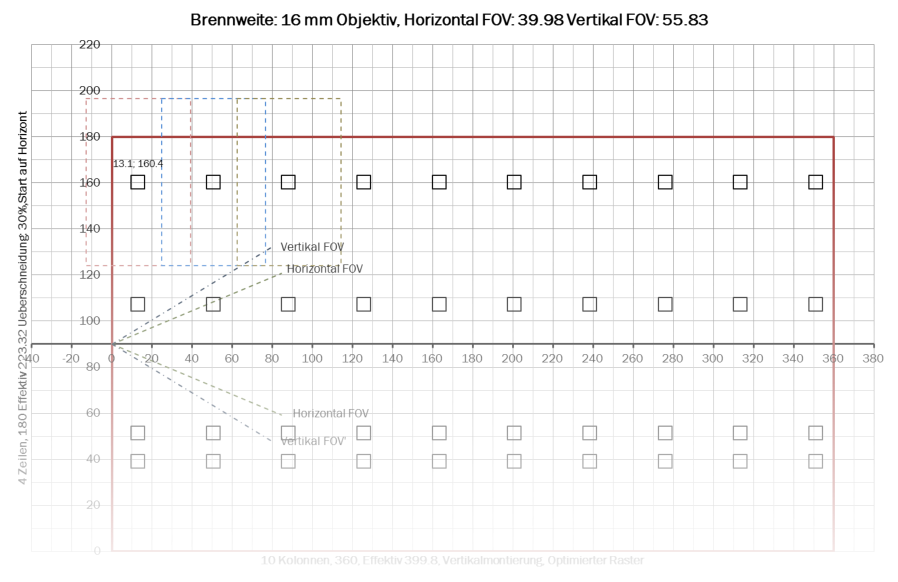
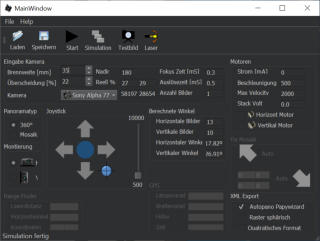
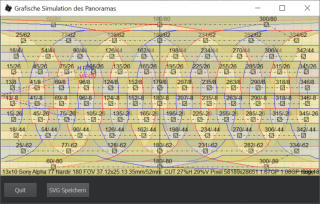
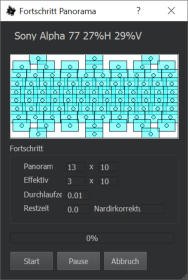
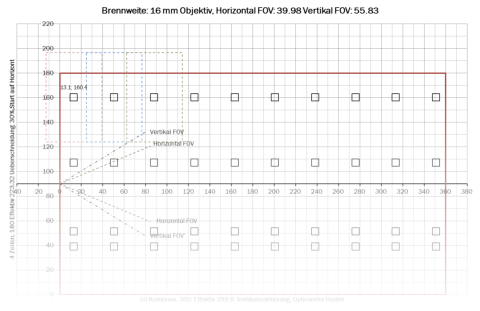
My robots are controlled via Tinkerforge Bricks. The stepper motors are controlled with acceleration and deceleration to avoid vibrations. 192'000 steps for 360°. The software is developed in Python 3. The software can be adapted to any camera type. The internal simulator generates a vector SVG file for documentation and verification. Newly square images are supported to optimize the lens distortion. I also built in the drones cameras for the simulation.

Willkommen

hdrpano, © Kilian Eisenegger 2026, info@hdrpano.ch, 4800 Zofingen Switzerland
Impressum
Welcome to my private homepage. As an Alpinist and biker I come in my spare time to many beautiful places, which I often capture photographically. Either with DJI drones or with my self-built panorama robots. I load the 3D pictures on Google Street View. They can then be viewed in Google Maps. I am Google Street View trusted = certified. For publishing the 360° pictures I use Pano2VR and krpano.
Hardware and Software Development
My robots are controlled via Tinkerforge Bricks. The stepper motors are controlled with acceleration and deceleration to avoid vibrations. 192'000 steps for 360°. The software is developed in Python 3. The software can be adapted to any camera type. The internal simulator generates a vector SVG file for documentation and verification. Newly square images are supported to optimize the lens distortion. I also built in the drones cameras for the simulation.